激光雷達

激光雷達LiDAR(Light Detection and Ranging) ,是激光探測及測距系統(tǒng)的簡稱,與微波雷達相類似,是探測目標的位置、速度等特征量的雷達系統(tǒng)。其工作方式是向目標發(fā)射探測激光信號,然后將接收到的從目標反射回來的信號與發(fā)射信號進行比較處理,以此獲得目標的有關(guān)信息,如目標距離、方位、高度、速度、姿態(tài)、甚至形狀等參數(shù)并生成點云數(shù)據(jù),實現(xiàn)對目標的探測、跟蹤和識別。
激光雷達根據(jù)激光線數(shù)不同分為2D以及3D激光雷達,單線2D-Lidar生成二維平面地圖,多用于室內(nèi)機器人導(dǎo)航、倉庫AGV等應(yīng)用;多線3D-Lidar生成三維地圖, 提供FOV內(nèi)目標物完整的距離、角度和高度信息,廣泛用于自動駕駛、地形測繪以及三維高精地圖的構(gòu)建(3D-SLAM)。
激光雷達按照掃描方式分為機械掃描式(包括機軸旋轉(zhuǎn)式、轉(zhuǎn)鏡式)、MEMS掃描式、Flash以及OPA+FMCW式。
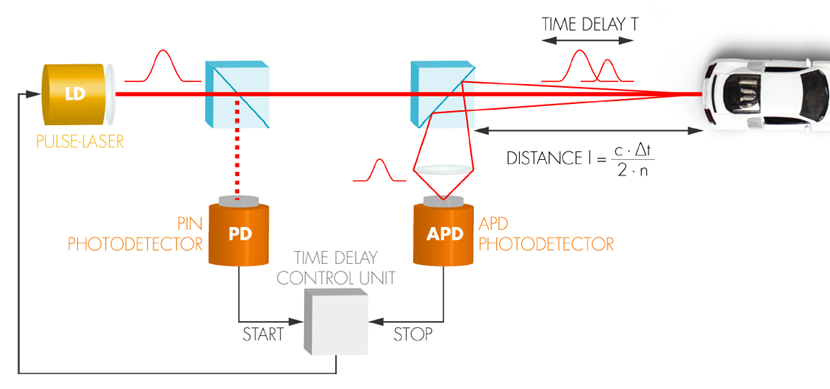
TOF原理圖
a) 機械掃描式
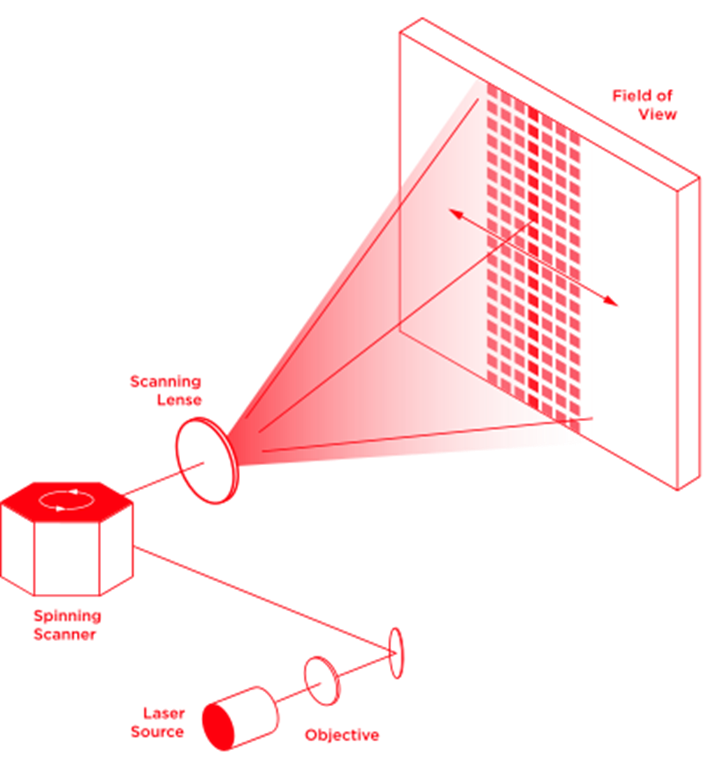
機械掃描式
機械掃描式激光雷達采用TOF原理,通過旋轉(zhuǎn)的機械鏡面來對激光光束發(fā)射和接收到回波信號之間的時間差進行測量,進而確定目標物體的距離信息和方位信息,實現(xiàn)對周圍360°的掃描成像。
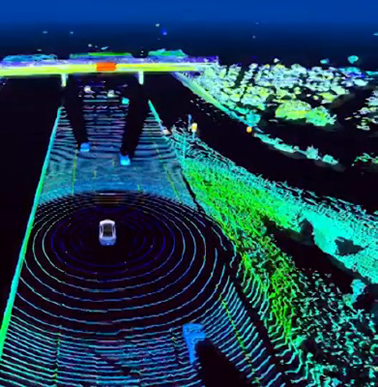
機械掃描點云數(shù)據(jù)
b) MEMS掃描
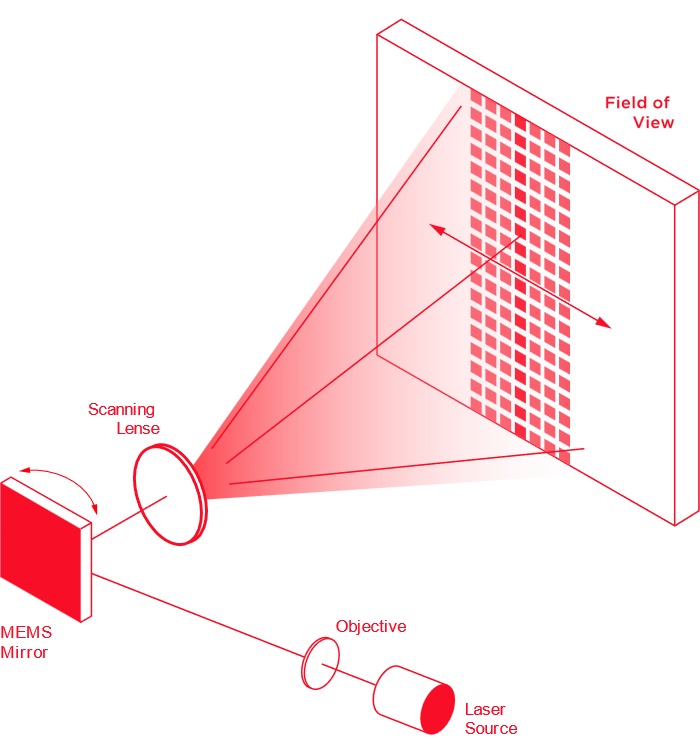
MEMS掃描式
MEMS激光雷達不使用機械電機方案,而是使用半導(dǎo)體方案來掃描或引導(dǎo)光線,。MEMS將包括反射鏡在內(nèi)的所有機械器件全部集成于單個芯片上,利用驅(qū)動信號(電熱、電磁、靜電、壓電效應(yīng))控制微型反射鏡的快速振動來實現(xiàn)MEMS雷達激光光束掃描。
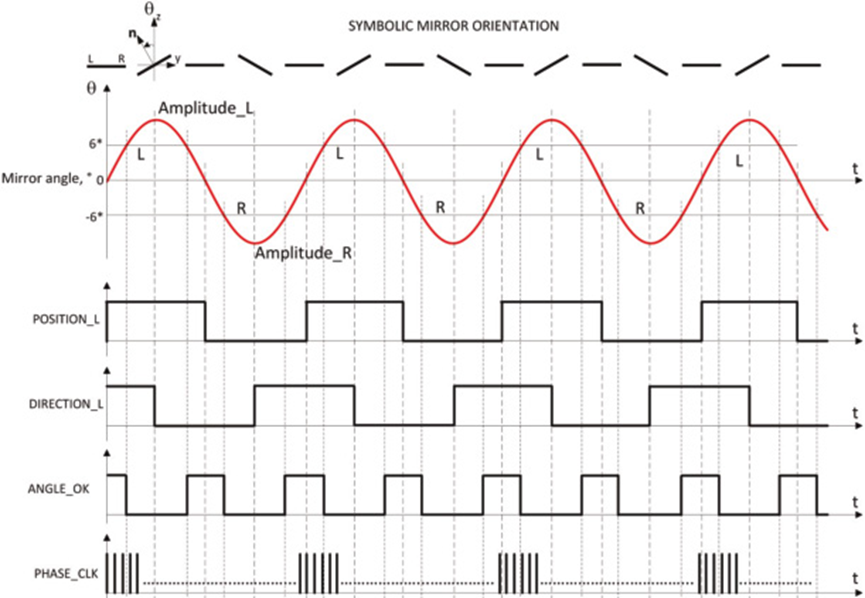
微鏡位置、方向、角度時域圖
c) Flash
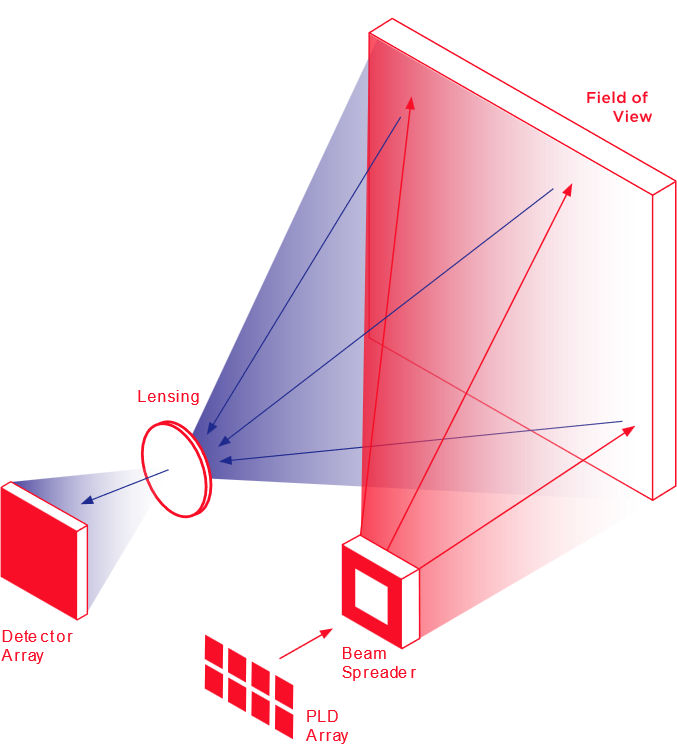
Flash式激光掃描
激光發(fā)射單元在極短的時間內(nèi)以面陣激光脈沖的形式對探測目標進行照射,經(jīng)探測目標反射的回波信號由接收系統(tǒng)中位于透鏡焦平面處的陣列傳感器完成光電轉(zhuǎn)換,根據(jù)陣列上每個像素點記錄的飛行時間信息來進行測距,并完成對探測目標三維圖像的繪制。
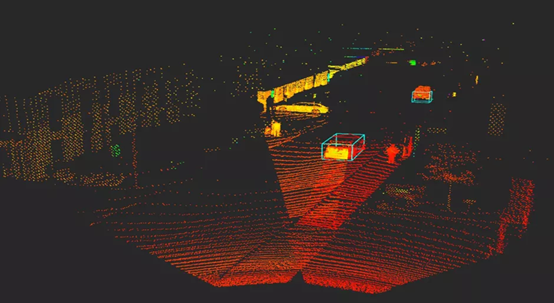
3D Flash點云
d) OPA+FMCW
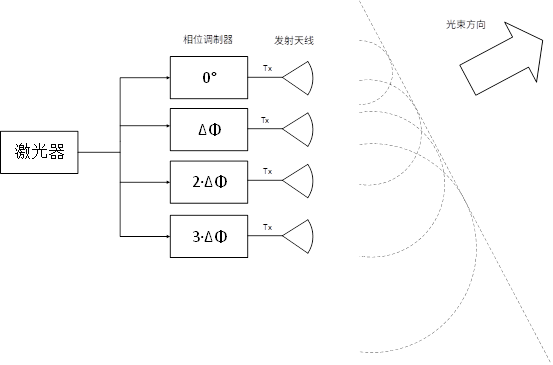
OPA掃描原理圖
激光器功率均分到多路相位調(diào)制器陣列,光場通過光學(xué)天線發(fā)射,在空間遠場相干疊加形成一個具有較強能量的光束。經(jīng)過特定相位調(diào)制后的光場在發(fā)射天線端產(chǎn)生波前的傾斜,從而在遠場反映成光束的偏轉(zhuǎn),通過施加不同相位,可以獲得水平方向上不同角度的光束掃描。另外通過改變光學(xué)頻率梳中不同梳齒的波長,可實現(xiàn)在垂直方向上的光束控制。
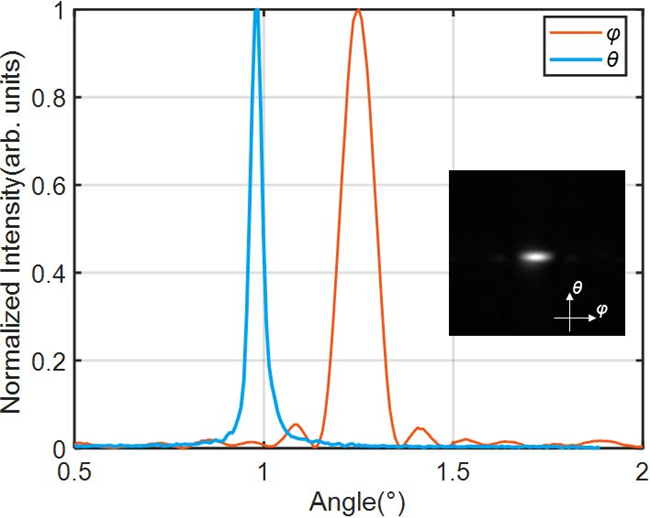
OPA掃描水平/垂直方向角度
與OPA結(jié)合使用的FMCW是利用可調(diào)諧半導(dǎo)體激光器進行驅(qū)動,進而生成光頻率隨著時間以三角波規(guī)律變化的信號。通過對生成的信號進行分光處理,將其分為本振光和信號光兩部分,激光光束經(jīng)過激光發(fā)射系統(tǒng)發(fā)射后照射到待測目標表面上,本振光與信號光的回波信號在光電探測器上混頻。混頻后的中頻信號通過傅里葉變換等方法進行數(shù)據(jù)采集和處理,從而提取出目標的距離、速度等信息。
推薦型號:
